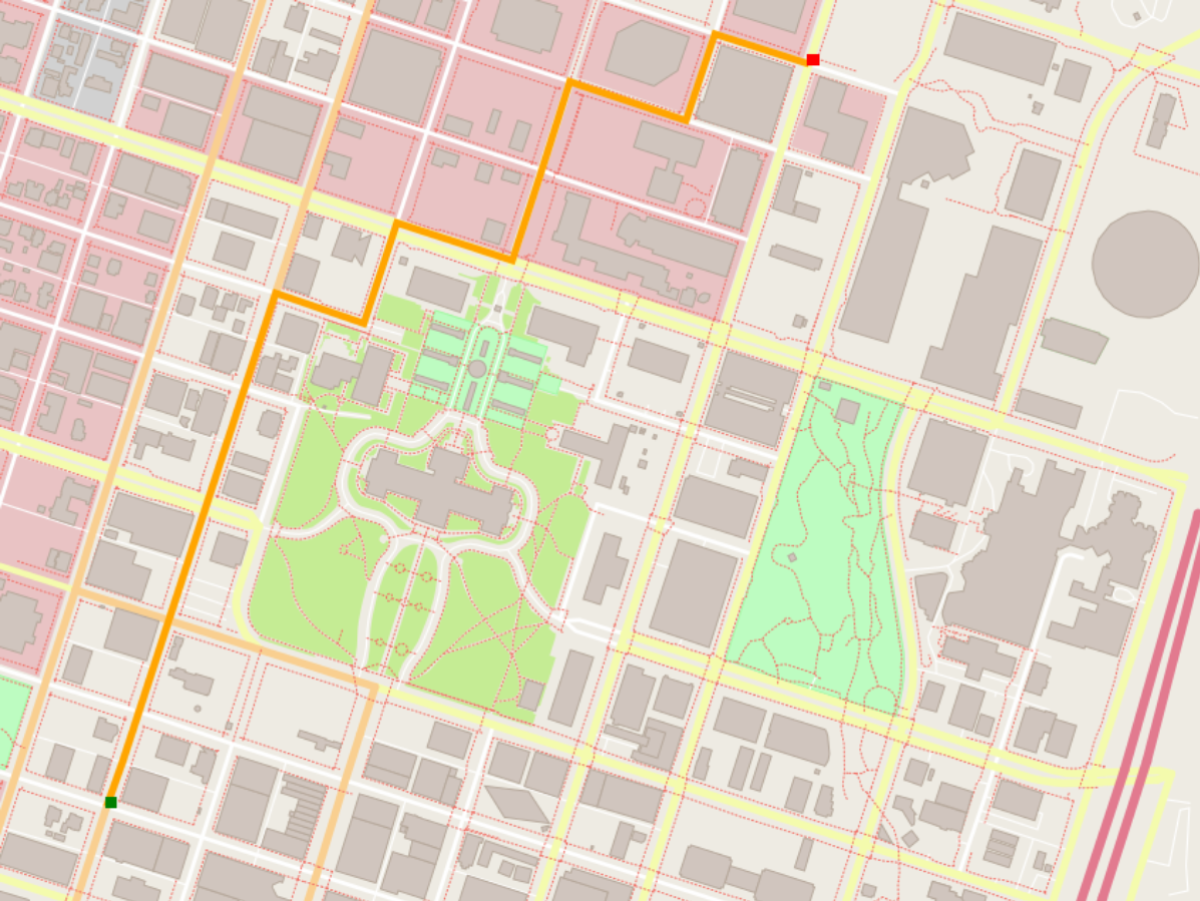
A* implementation on a real-time map with C++
Tuesday, June 16, 2020
Dependencies for Running Locally
- cmake >= 3.11.3
- make >= 4.1 (Linux, Mac), 3.81 (Windows)
- gcc/g++ >= 7.4.0
- IO2D
- Installation instructions for all operating systems can be found here
- This library must be built in a place where CMake
find_packagewill be able to find it - You can clone and install this anywhere as long as you install it (last step from instruction) (At least with Ubuntu)
Building
When cloning this project, be sure to use the --recurse-submodules flag. Using HTTPS:
git clone https://github.com/udacity/https://github.com/AbhinavMir/OpenStreetMap-in-CPP.git --recurse-submodules
or with SSH:
git clone git@github.com:udacity/https://github.com/AbhinavMir/OpenStreetMap-in-CPP.git --recurse-submodules
To compile the project, first, create a build directory and change to that directory:
mkdir build && cd build
From within the build directory, then run cmake and make as follows:
cmake ..
make
Running
The executable will be placed in the build directory. From within build, you can run the project as follows:
./OSM_A_star_search
Or to specify a map file:
./OSM_A_star_search -f ../<your_osm_file.osm>
[From the course Udacity’s C++ Nanodegree program]